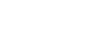
Recently, professor Yuzhi Shi from Prof. Zhanshan Wang and Prof. Xinbin Cheng’s group (School of Physics Science and Engineering, Tongji University), published a review entitled “Optical manipulation with metamaterial structures” in the journal of Applied Physics Reviews (IF=19.527), which was selected as a Featured Article and highlighted by AIP Scilight. This review outlines the fundamental physics behind optical forces and metamaterials directly related to the concepts of optical manipulation for the first time, summarizes the typical optical manipulation applications based on metamaterials, and classifies the metamaterials-based optical manipulation into” Meta-tweezers” and “Meta-robots” according to different mechanisms (see Fig.1).
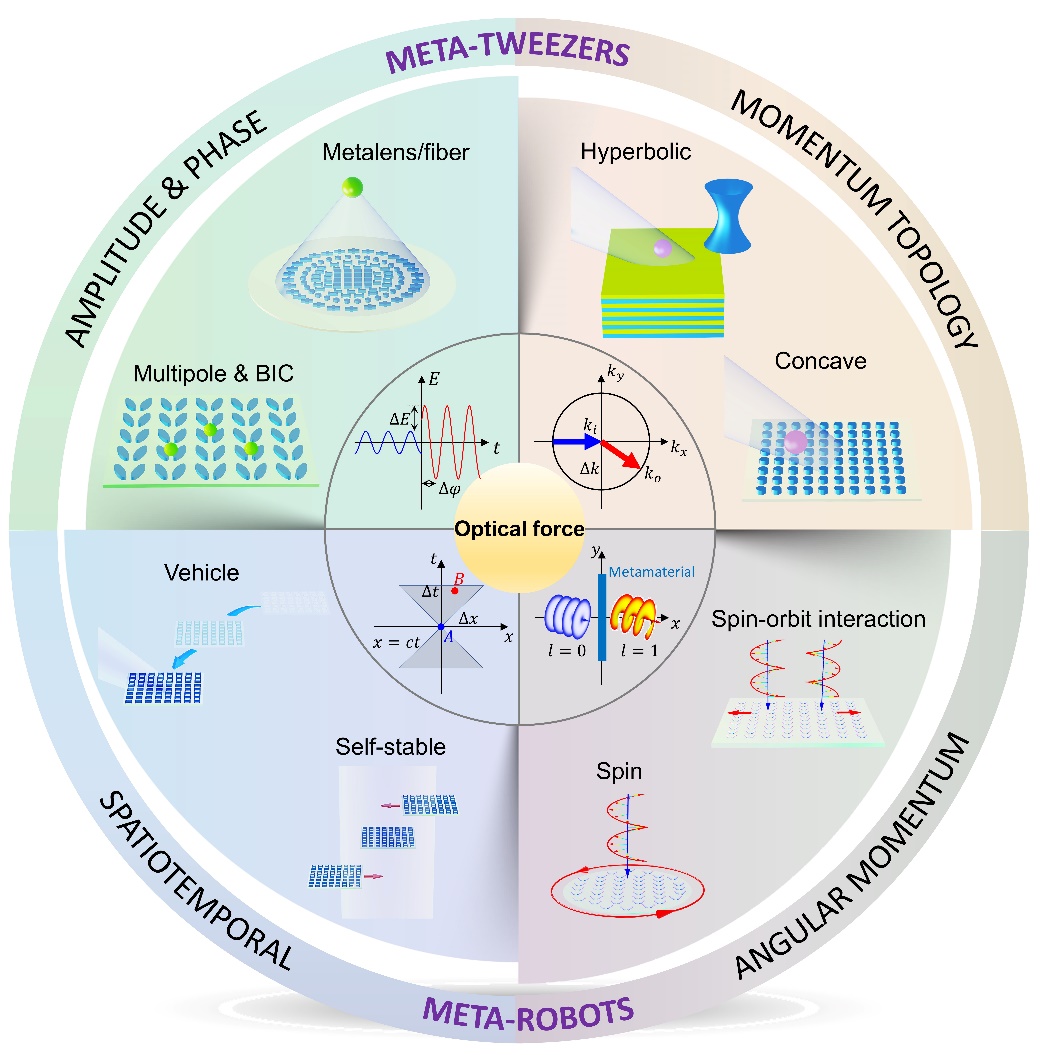
FIG.1. Meta-tweezers and meta-robots with the multi-dimensional manipulation of light. Schematic illustration of optical manipulation with metamaterials from four properties of light wave: amplitude and phase, momentum topology, spatiotemporal and angular momentum, to realize the multifunctional manipulations of particles (meta-tweezers) and active meta-structures (meta-robots).
According to light-matter interactions, optical tweezers can exert force and torques on particles through the momentum exchange between different mediums. Ever since the pioneer worked done by Prof. Arthur Ashkin (Nobel Laureate) in the 1980s, optical tweezers have benefited a diversity of applications in many disciplines, including physics, biomedical and so forth. Conventional optical tweezers are widely based on refractive optics, and they require excessive auxiliary optical elements to reshape both amplitude and phase, as well as wavevector and angular momentum of light, and thus impose limitations on the overall cost and integration of optical systems. Metamaterials can provide both electric and optically induced magnetic responses in subwavelength optical structures, and they are highly beneficial to achieve unprecedented control of light required for many applications and can open new opportunities for optical manipulation. In this review, researchers review the recent advances in the field of optical manipulation employing the physics and concepts of metamaterials and demonstrate that metamaterial structures could not only help to advance classical operations such as trapping, transporting, and sorting of particles, but they can uncover exotic optical forces such as pulling and lateral forces.
In addition, due to recent advances in nanofabrication technology, meta-robots have opened another realm for optical manipulation. Those meta-robots take full advantages of interactions of light and nanostructure to serve as a new class of micro/nanomechanical devices. The meta-robots can achieve multidimensional trajectoriesvia dynamically controlling the force and torque from different polarizations of light. With a combination of different degrees of freedom, the optical-driven meta-robots are promising and expected to provide tremendous biomedical applications in the future, such as cargo transporting and tumor targeting.
FIG.2. Dynamic control of optical forces and potentials. (a)Tuning of focusing depth by different polarizations for optical trapping in a polarization-sensitive metasurface. (b)A monolayer conveyor by graphene’s Dirac plasmon for sub-1nm nanoparticle conveying. (c)Plasmonic meta-robot powered by a linearly polarized beam moving in a linear way. (d)Complex-trajectory meta-robot powered by the synergy of different polarizations of light. The force and torque on the meta-robot can be controlled with the linearly and circularly polarized light waves respectively. (e)Self-stabilizing “light sail” under the levitation and propulsion of light. The spatial restoring force is engineered by the scattered phase. (f)Optical “adhesion” force and propulsion force on a metamaterial near a wall.
Finally, researchers culminate the review with an outlooking discussing future novel opportunities in this recently emerged field ranging from enhanced particle manipulation to meta-robot actuation. Such as meta-robots designed with diverse degrees of freedoms, multifunctional manipulation assisted by meta-holograms as well as angular momentum control.
Professor Yuzhi Shi from School of Physics Science and Engineering, Tongji University, is the first author of the paper. Prof. Qinghua Song from Tsinghua Shenzhen International Graduate School, Prof. Yefeng Yu from Nanjing University of Science and Technology, Prof. Weiming Zhu from University of Electronic Science and Technology of China, Prof. Yuri Kivshar from Australian National University and Prof. Ai Qun Liu from Nanyang Technological University are the corresponding authors of the paper. The work was supported by the Fundamental Research Funds for the Central Universities.
Paper link:https://aip.scitation.org/doi/10.1063/5.0091280
AIP Scilight report link:https://aip.scitation.org/doi/10.1063/10.0013730